Control for Powered Knee and Ankle Prostheses
At EPIC lab we have developed control architectures for powered prosthetic devices that have knee and ankle driven by brush-less DC motors.

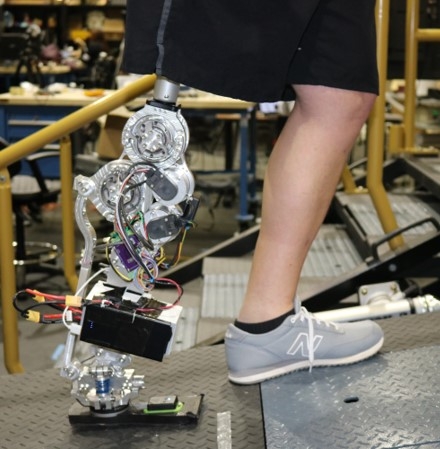
Passive prostheses have limitations for ambulating over different terrains and environmental conditions. At EPIC lab we have developed a control architecture using our powered prosthetic device that has knee and ankle driven by brush-less DC motors.
The controller is divided in three tiers: high-level control, mid-level control, and low-level control. The high-level controller is responsible for determining the locomotion mode. At the mid-level control, an impedance controller is paired with a state machine to coordinate the kinematics and kinetics of the device with the user during community ambulation tasks.
You can read more about this in the paper:
“Control and Experimental Validation of a Powered Knee and Ankle Prosthetic Device”